Research
Training AI models for specialized tasks in construction
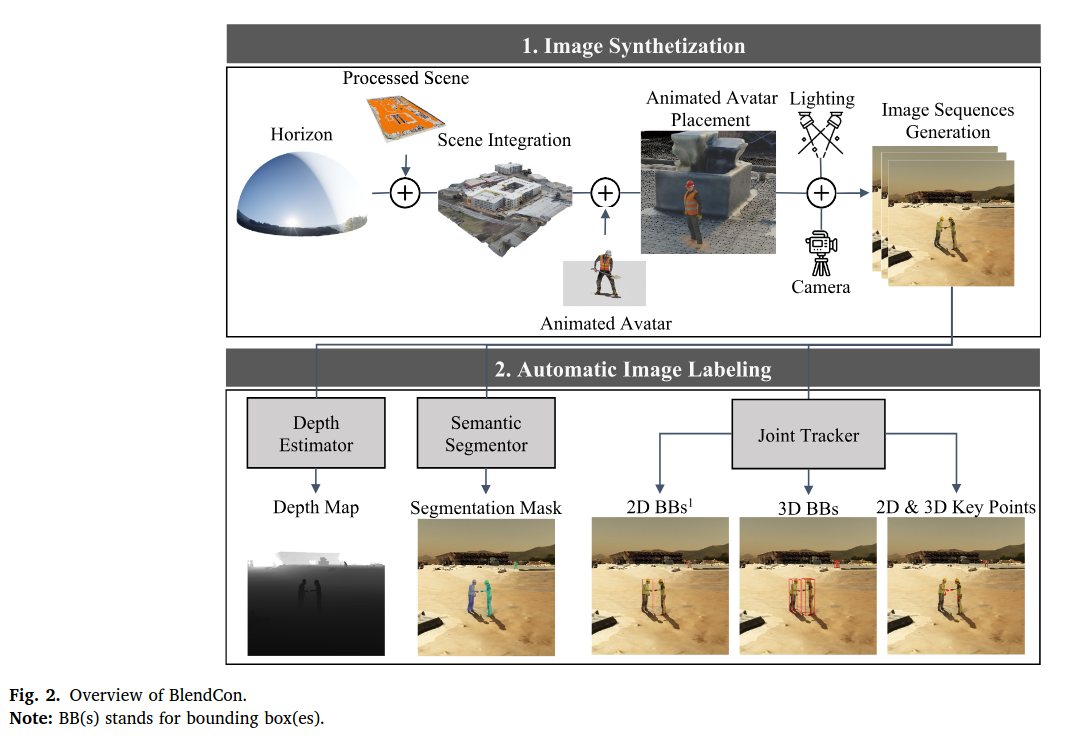
Training AI models for specialized construction tasks is limited by the scarcity of high-quality, labeled data. While large foundational models perform well on general tasks, they often struggle in domain-specific scenarios requiring high precision. This research introduces BlendCon, a framework designed to generate and label synthetic construction imagery using 3D simulations. BlendCon enables scalable, realistic data creation to support the training of vision models tailored to the construction industry.
The work also addresses the reality gap—the performance difference between models trained on synthetic versus real-world data. Although synthetic data offers scalability and flexibility, it often falls short in generalizing to real-world conditions. Ongoing efforts focus on developing adaptation techniques to enhance synthetic-to-real transfer, aiming to make the use of synthetic data more effective and reliable in practical construction applications.

Intelligent 3D Mapping for Autonomous Construction Monitoring
This research focuses on building an intelligent point cloud enhancement system to generate detailed 3D maps of large-scale construction sites. Leveraging a mobile robotic platform equipped with LiDAR and stereo vision cameras, the system integrates geometric and visual data to produce spatially rich, high-resolution maps. By applying cutting-edge algorithms like Neural Radiance Fields and Gaussian Splatting, it enhances depth accuracy and fills in gaps left by traditional LiDAR systems. The resulting maps enable real-time site monitoring, improved progress tracking, and lay the foundation for digital twins and autonomous construction workflows—all with cost-effective sensor configurations.
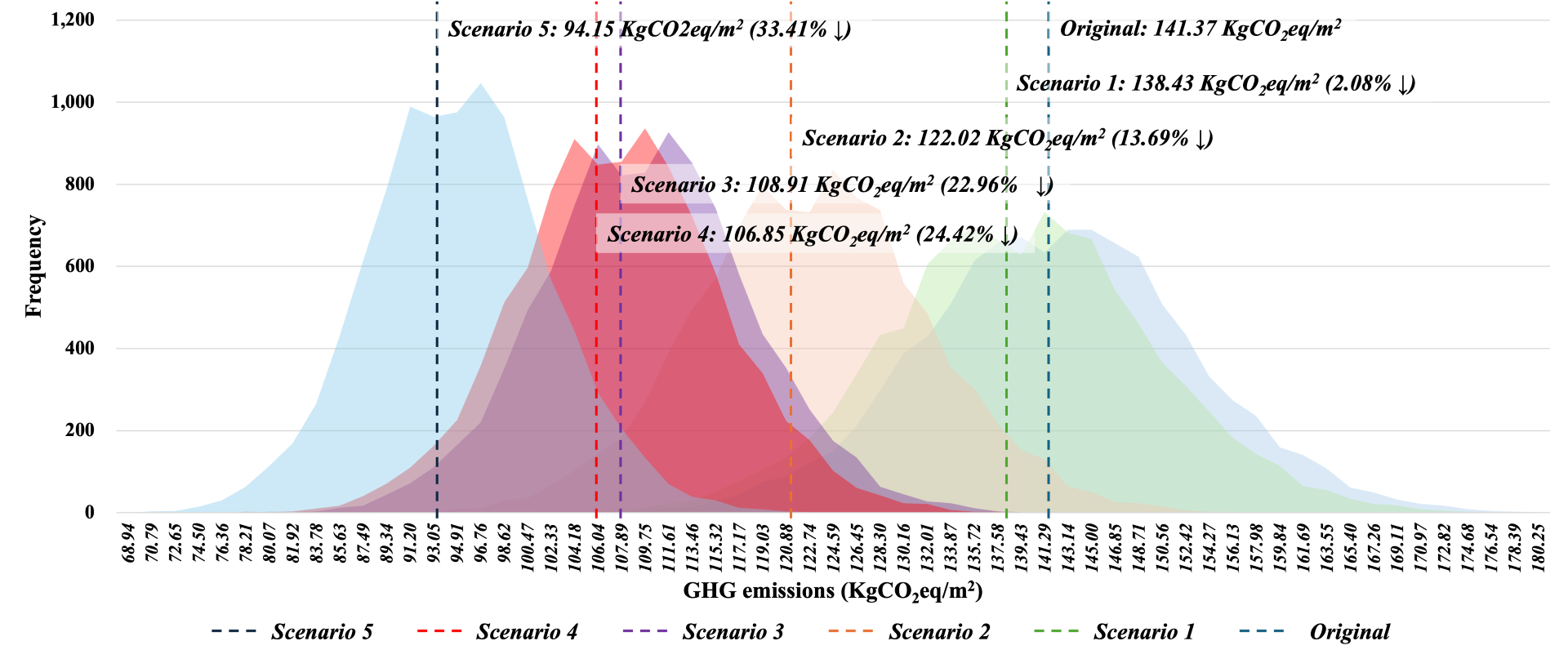
Exploring data-driven strategies for decarbonized infrastructure.
Aiming to support national decarbonization goals, this project integrates early-stage design variables, material datasets, and uncertainty analysis to quantify embodied carbon in high-rise residential buildings. The outcome includes regionally adaptable workflows for low-carbon structure selection.
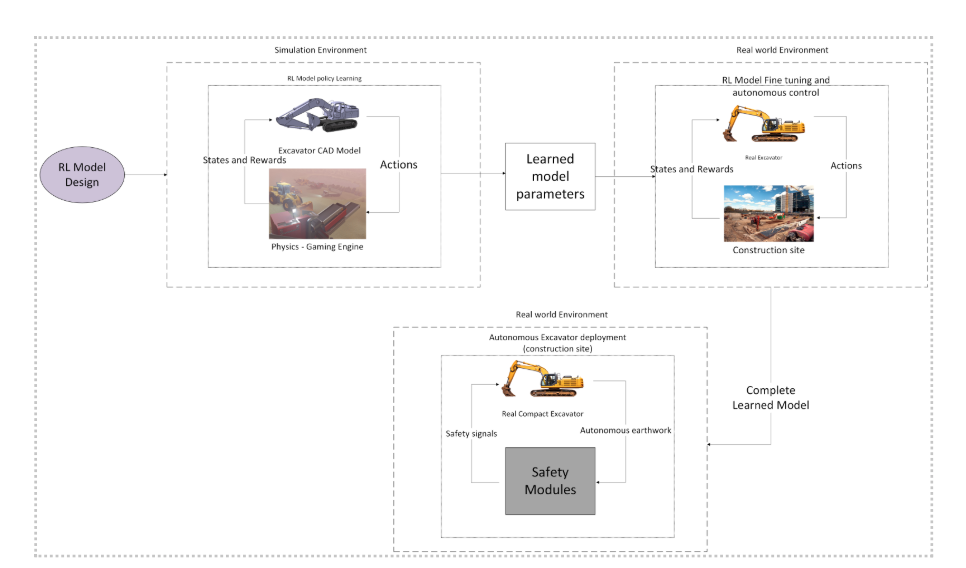
Autonomous Excavation via Reinforcement Learning
This research explores the use of reinforcement learning (RL) to automate excavation tasks, aiming to address labor shortages and improve safety in construction. By mimicking expert operator strategies, RL models—trained through policy gradients and deep learning—learn to perform complex operations like digging, leveling, and material placement. Starting in simulation environments and progressing to real-world deployment on compact robotic excavators, the project demonstrates the potential of AI-driven machinery to carry out precise excavation tasks. This milestone marks a step toward scalable, intelligent automation in construction, with applications in digital twinning and modular robotic systems.